5. PID - Điều áp
Logic ứng dụng
- Chạy, dừng bằng
CÔNG TẮCngoài. - Tần số tự động điều chỉnh theo áp suất đặt qua thuật toán PID (tích hợp trong biến tần).
- Model áp dụng: Tất cả
Hướng dẫn cài đặt
- Phần cứng bổ sung
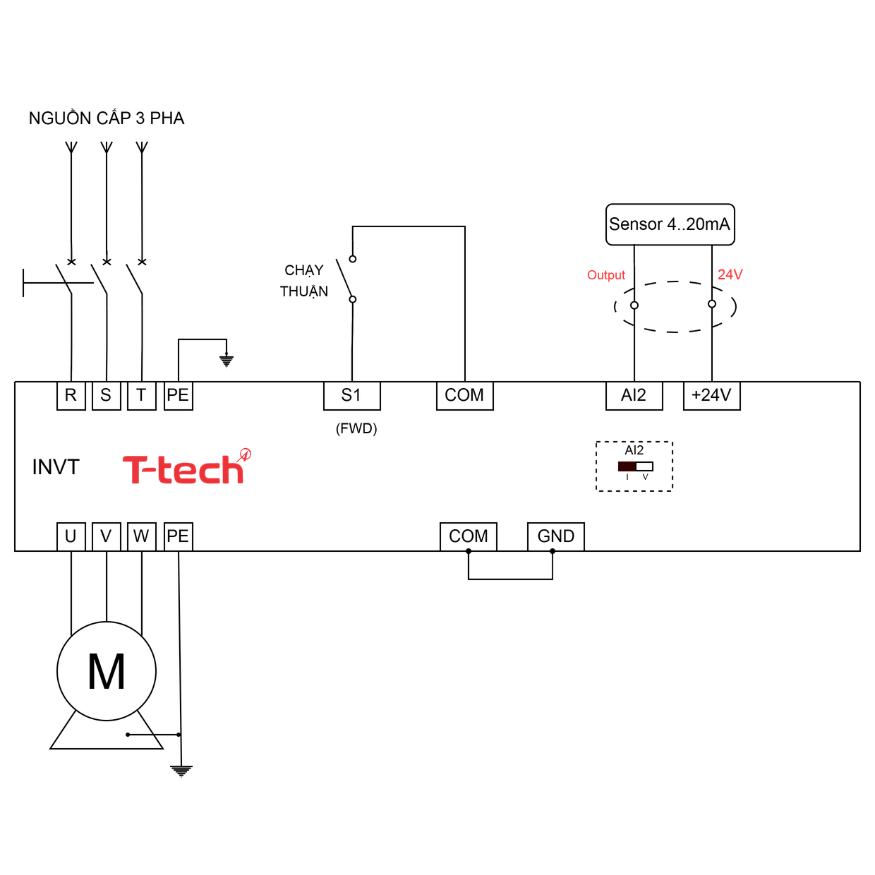
- Sơ đồ đấu dây
- Cài đặt thông số
- Lưu ý
| Tên thiết bị | YCKT | Số lượng | ĐVT | Ghi chú |
|---|---|---|---|---|
| Công tắc 2 vị trí | 1NO | 1 | Cái | |
| Cảm biến áp suất | Nguồn: +24VDC Output: 4..20mA | 1 | Cái | 0..20mA hoặc 0-10V đều OK |
- Cần gạt Jump của AI2 để chuyển sang I để nhận tín hiệu dạng mA.
- Nếu dùng cảm biến loại 0-10V thì để jump ở V.
- Nối chân
GNDvàCOMvới nhau.
| Thông số | Giá trị | Đơn vị | Diễn giải |
|---|---|---|---|
| P00.18 | 1 | Reset cài đặt về mặc định | |
| P02 | Nhóm thông số Motor | ||
| P02.01 | ... | kW | Công suất định mức |
| P02.02 | ... | Hz | Tần số định mức |
| P02.03 | ... | RPM | Tốc độ định mức |
| P02.04 | ... | V | Điện áp định mức |
| P02.05 | ... | A | Dòng điện định mức |
| P00 | Nhóm thông số cơ bản | ||
| P00.01 | 1 | Lệnh RUN/STOP: Terminal | |
| P00.03 | 50 | Hz | Tần số hoạt động tối đa |
| P00.04 | 50 | Hz | Giới hạn trên của tần số hoạt động |
| P00.05 | 10 | Hz | Giới hạn dưới của tần số hoạt động Để motor không chạy quá lâu ở tần số thấp --> Tránh nóng motor |
| P00.06 | 7 | Nguồn chỉnh tần số: PID | |
| P00.11 | 10 | s | Thời gian tăng tốc |
| P00.12 | 10 | s | Thời gian giảm tốc |
| P01 | Nhóm Khởi động - Dừng nghỉ | ||
| P01.19 | 2 | Biến tần sẽ làm gì nếu tần số < tần số ngưỡng dưới? P01.19=2: Tạm nghỉ P01.19=1: Stop P01.19=0: Run | |
| P05 | Nhóm Input Terminals | ||
| P05.01 | 1 | S1: Chạy thuận | |
| P05.37 | 2 | V | Ngưỡng dưới của AI2 |
| P05.39 | 10 | V | Ngưỡng trên của AI2 |
| P09 | Nhóm PID | ||
| P09.00 | 0 | Nguồn đặt PID --> 0: P09.01 | |
| P09.01 | 20 | % | Giá trị đặt Theo dải của đầu vào, ví dụ 0-10bar thì 100% tương ứng là 10 bar Muốn áp suất đặt là 2bar thì cần nhập 20% |
| P09.02 | 1 | Nguồn feedback của PID 0: AI1 1: AI2 2: AI3 | |
| P09.03 | 0 | Chiều tác động của PID 0: (+) Feedback > Tham chiếu → Giảm tần số (Làm nóng). 1: (-) Feedback > Tham chiếu → Tăng tần số (Làm mát). | |
| P09.04 | 1 | Hệ số Kp | |
| P09.05 | 0.1 | Giây | Hệ số Ti |
| P09.06 | 0.0 | Giây | Hệ số Td |
Giám sát các tín hiệu
| Thông số | Giá trị | Đơn vị | Diễn giải |
|---|---|---|---|
| P17 | Nhóm thông số giám sát | ||
| P17.23 | % | Giá trị PID đặt Range: -100 ~ 100% | |
| P17.24 | % | Giá trị PID phản hồi Range: -100 ~ 100% |
- Thường áp dụng để điều khiển áp suất hoặc nhiệt độ.
- Kiểm tra kỹ kết nối đúng phần cứng.
- Xem kết quả feedback của tín hiệu trả về và có hiệu chỉnh cho chuẩn xác.
- Tùy chỉnh hệ số PID cho phù hợp.