2. Đồng bộ nhiều biến tần
Áp dụng khi có 1 biến tần mẹ và nhiều biến tần con chạy theo.
Logic ứng dụng
- Chạy, dừng bằng
CÔNG TẮC. - Sử dụng 01 Biến trở để điều khiển tốc độ của cả hệ (gồm 2 hay nhiều biến tần).
- Mỗi biến tần điều khiển motor có công suất và đường kính trục quay khác nhau.
- Để duy trì đồng đều --> Đường kính nhỏ phải quay nhanh hơn đường kính lớn.
- Model áp dụng: Tất cả
Hướng dẫn cài đặt
- Phần cứng bổ sung
- Sơ đồ đấu dây
- Cài đặt thông số
- Lưu ý
| Tên thiết bị | YCKT | Số lượng | ĐVT | Ghi chú |
|---|---|---|---|---|
| Công tắc 2 vị trí | 1NO | 1 | Cái | |
| Biến trở | 10kΩ | 1 | Cái |
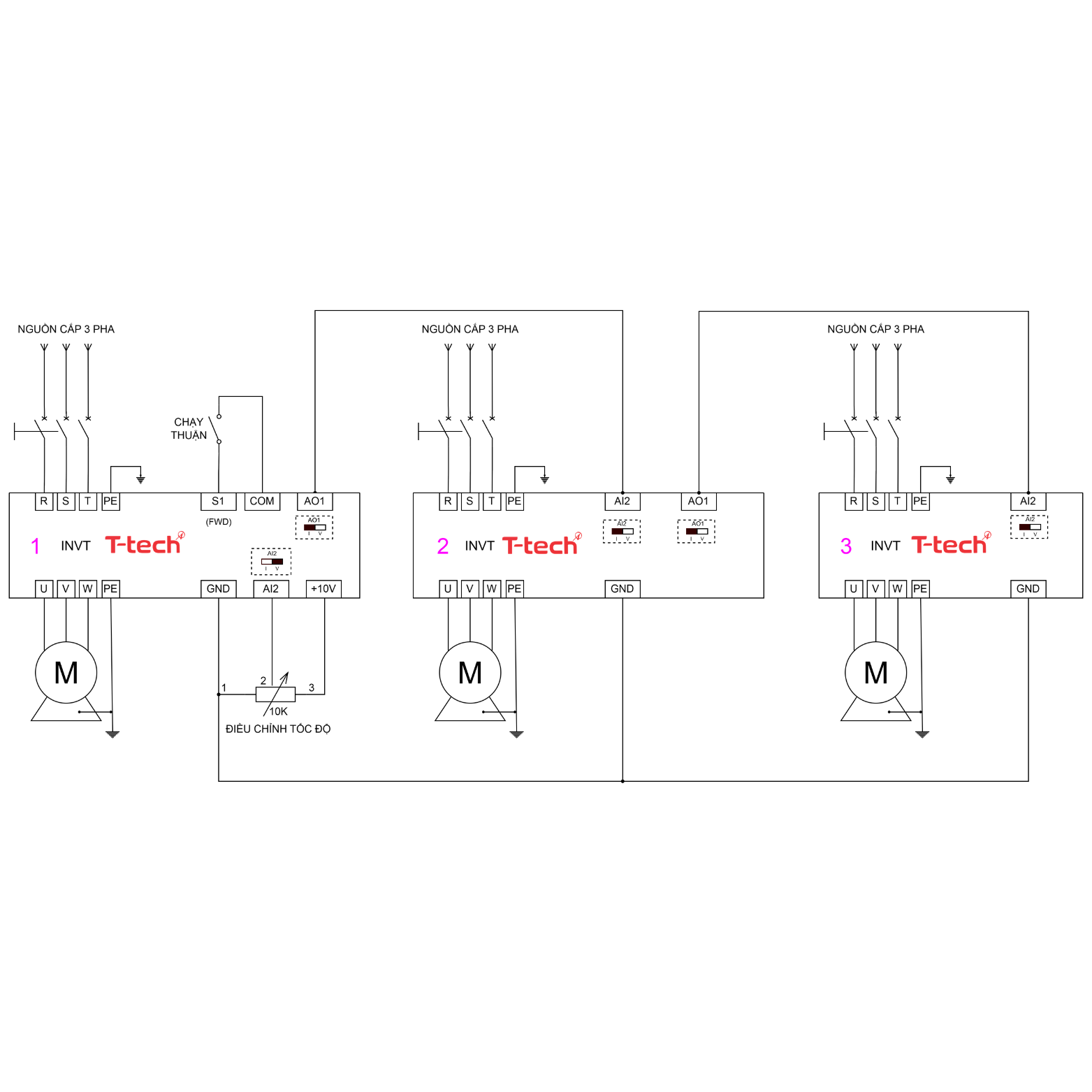
- Lấy tín hiệu
AO1của biến tần trước cấp vàoAI2của biến tần sau. - Sử dụng Biến trở trên Keypad (Kênh A) để tinh chỉnh theo thực tế mỗi biến tần.
| Thông số | Giá trị | Đơn vị | Diễn giải |
|---|---|---|---|
| P00.18 | 1 | Reset cài đặt về mặc định | |
| P02 | Nhóm thông số Motor | ||
| P02.01 | ... | kW | Công suất định mức |
| P02.02 | ... | Hz | Tần số định mức |
| P02.03 | ... | RPM | Tốc độ định mức |
| P02.04 | ... | V | Điện áp định mức |
| P02.05 | ... | A | Dòng điện định mức |
| P00 | Nhóm thông số cơ bản | ||
| P00.00 | 1 | Chế độ điều khiển: 1: Điều khiển theo lực Torque 2: Chế độ V/F (Mặc định) | |
| P00.01 | 1 | Lệnh RUN/STOP: Terminal | |
| P00.03 | 50 | Hz | Tần số hoạt động tối đa |
| P00.04 | 50 | Hz | Giới hạn trên của tần số hoạt động |
| P00.05 | 0 | Hz | Giới hạn dưới của tần số hoạt động |
| P00.07 | 1 | Nguồn chỉnh tần số Kênh B: AI1 | |
| P00.06 | 2 | Nguồn chỉnh tần số: AI2 | |
| P00.08 | 1 | Tần số tham chiếu Kênh B: Theo tần số Kênh A | |
| P00.09 | 1 | Tần số hoạt động: 0: Chạy theo kênh A (Mặc định) 1: Chạy theo kênh B | |
| P00.11 | 10 | s | Thời gian tăng tốc |
| P00.12 | 10 | s | Thời gian giảm tốc |
| P06 | Nhóm Output Terminals (Chỉ cài cho BT1 và BT2) | ||
| P06.14 | 11 | AO1: Xuất tín hiệu Analog ở AI2 | |
| P06.17 | 0 | % | Giới hạn dưới AO1 (%) |
| P06.18 | 0 | V | Giới hạn dưới AO1 (V) |
| P06.19 | 100 | % | Giới hạn trên AO1 (%) |
| P06.20 | 10 | V | Giới hạn trên AO1 (V) |
- Kiểm tra kỹ kết nối đúng phần cứng.
- Jump tất cả các chân
AO1AI2ở V. - Nối thông 3 chân
GNDcủa 3 Biến tần cùng nhau. - Chạy thử nghiệm trước khi đưa vào vận hành.